Collimated Comparison¶
[1]:
%pip install diffinytrace.zip
Processing .\diffinytrace.zip
Note: you may need to restart the kernel to use updated packages.
WARNING: Requirement 'diffinytrace.zip' looks like a filename, but the file does not exist
ERROR: Could not install packages due to an OSError: [Errno 2] No such file or directory: 'C:\\Users\\marti\\Documents\\GitHub\\diffinytrace\\examples\\diffinytrace.zip'
[2]:
from google.colab import drive
drive.mount('/content/gdrive')
from os import listdir
from os.path import isfile, join
path = "gdrive/MyDrive/results_final"
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Cell In[2], line 1
----> 1 from google.colab import drive
2 drive.mount('/content/gdrive')
3 from os import listdir
ModuleNotFoundError: No module named 'google'
[1]:
import sys
import os
sys.path.insert(0, os.path.abspath(".."))
path = "results/results_fincal_collimated_compare"
[2]:
import sys
import os
import gc
import tqdm
device = "cuda:0"
[3]:
import diffinytrace as dit
import torch
import numpy as np
torch.set_default_dtype(torch.float64)
import random
SEED = 0
np.random.seed(SEED)
torch.manual_seed(SEED)
random.seed(SEED)
from diffinytrace.source import CollimatedMonochromatic,CollimatedGaussianBeam
from diffinytrace.gaussian_smoother import GaussianSmootherSquare,make_merit_function,make_evaluation_function
import matplotlib.pyplot as plt
def run_optimiaztion(sigma,use_desired_irradiance_smoothing,return_system=False):
in_aperture = 4.0
in_aperture_lens = 5.0
desired_width_square = 4.0
out_aperture = 8.0
source_wl = 0.589
source_gaussian_constant = 0.035
light_transform = dit.transforms.Identity()
source = CollimatedGaussianBeam(light_transform,in_aperture,source_wl,source_gaussian_constant)
lens_mat = dit.materials["BAK1"]#dit.materials["NBK7"]
env_mat = dit.materials["AIR"]
lens1_thickness = 2.
lens1_surf1 = dit.Bspline(in_aperture_lens,[4,4],[11,11])#dit.Legendre(in_aperture_lens,20)#
lens1_surf2 = dit.Plane()
det_surf = dit.Plane()
lens1_transform = dit.transforms.Distance(5.0,parent_transform=source)
lens1_transform.distance.requires_grad = False
lens1 = dit.Lens(lens1_transform,lens1_thickness,lens1_surf1,lens1_surf2,lens_mat,in_aperture_lens,is_square=False)
det_transform = dit.transforms.Distance(10.,parent_transform=lens1)
det_transform.distance.requires_grad = False
detector = dit.Detector(det_transform,det_surf,out_aperture)
system = dit.SequentialOpticalSystem({"source":source,"lens1":lens1,"detector":detector},env_mat)
system.to(device)
sequence = ["source","lens1","detector"]
N = 2**17
grid_size = 128
def desired_irradiance_fun(y):
out = (torch.abs(y[:,0]) < desired_width_square).float() * (torch.abs(y[:,1]) < desired_width_square).float()
return out
smoother = GaussianSmootherSquare(out_aperture,
grid_size=grid_size,
sigma=sigma,
desired_irradiance_fun=desired_irradiance_fun,
smoothed_num_integration_points=2**22,
smoothed_num_splits=10,
device=device)
#dit.plotting.quantity2D.plot(smoother.smoothed_desired_irradiance,"Smoothed [W/mm²]",out_aperture)
#dit.plotting.quantity2D.plot(smoother.discrete_desired_irradiance,"Discrete [W/mm²]",out_aperture)
#plt.savefig("collimated_desired_irr.png")
"""
x,weights = source.sample(N,method="sobol")
x = x.to("cuda:0")
weights = weights.to("cuda:0")
ray_multi = source.get_flux(x)*weights
O2, D2, wl, n_func_enviroment, meta_data = system(x,sequence)
local_pos = detector.to_local_pos(O2)[:,[0,1]]
out = smoother.get_none_smoothed_irradiance(local_pos,ray_multi)
dit.plotting.quantity2D.plot(out,"Irradiance Initial",out_aperture)
x,weights = source.sample(10)
x = x.to("cuda:0")
weights = weights.to("cuda:0")
O2, D2, wl, n_func_enviroment, meta_data = system(x,sequence)
dit.plotting.system2D.plot(system,meta_data)
"""
convergence_list = []
rmse_list = []
ssim_list = []
merit_func = make_merit_function(optical_system=system,sequence=sequence,source=source,detector=detector,smoother=smoother,num_rays=N,use_desired_irradiance_smoothing=use_desired_irradiance_smoothing,device=device)
evaluation_func = make_evaluation_function(optical_system=system,sequence=sequence,source=source,detector=detector,smoother=smoother,num_rays_per_split=100000,num_splits=200,device=device)
def convergence_callback_func(convergence_list:list, rmse_list:list, ssim_list:list):
def return_func():
L2_error, rmse, ssim_error = evaluation_func()
convergence_list.append(L2_error.detach().cpu().numpy())
rmse_list.append(rmse.detach().cpu().numpy())
ssim_list.append(ssim_error.detach().cpu().numpy())
return return_func
result = dit.optimize.minimize(merit_func,system.parameters(),method="L-BFGS-B",save_history=True,call_before_minimize=True)
result["sigma"] = sigma
result["use_desired_irradiance_smoothing"] = use_desired_irradiance_smoothing
convergence_callback_func(convergence_list, rmse_list, ssim_list)()
result["convergence_list"] = convergence_list
result["rmse_list"] = rmse_list
result["ssim_list"] = ssim_list
none_smooth_irr = []
smooth_irr = []
with torch.no_grad():
for k in range(10):
x,weights = source.sample(500000,method="monte_carlo")
x = x.to("cuda:0")
weights = weights.to("cuda:0")
ray_multi = source.get_flux(x)*weights
O2, D2, wl, n_func_enviroment, meta_data = system(x,sequence)
local_pos = detector.to_local_pos(O2)[:,[0,1]]
none_smooth_irr.append(smoother.none_smoothed_irradiance(local_pos,ray_multi).detach().cpu())
smooth_irr.append(smoother.smoothed_irradiance(local_pos,ray_multi).detach().cpu())
none_smooth_irr = torch.mean(torch.stack(none_smooth_irr),dim=0)
smooth_irr = torch.mean(torch.stack(smooth_irr),dim=0)
result["smooth_irr"] = smooth_irr.cpu().detach()
result["none_smooth_irr"] = none_smooth_irr.cpu().detach()
if return_system:
return result,system
return result
[4]:
import torch
sigmas = torch.linspace(0.05,1.,39)
def run_all(use_desired_irradiance_smoothing):
all_results = []
for i,sigma in tqdm.tqdm(enumerate(sigmas)):
all_results.append(run_optimiaztion(sigma,use_desired_irradiance_smoothing))
#print(f"finished {i+1}/{len(sigmas)}")
return all_results
[5]:
baseline_results = run_all(use_desired_irradiance_smoothing=False)
our_results = run_all(use_desired_irradiance_smoothing=True)
39it [12:39, 19.47s/it]
39it [19:25, 29.88s/it]
[6]:
results_folder = path + "/collimated_compare/"
try:
os.mkdir(results_folder)
except:
pass
import pickle
# Save
with open(results_folder+"baseline_results.pkl", "wb") as f:
pickle.dump(baseline_results, f)
with open(results_folder+"our_results.pkl", "wb") as f:
pickle.dump(our_results, f)
[12]:
import os
import pickle
results_folder = path + "/collimated_compare/"
# Optional: ensure folder exists (safe even if it already exists)
os.makedirs(results_folder, exist_ok=True)
# Load
with open(results_folder + "baseline_results.pkl", "rb") as f:
baseline_results = pickle.load(f)
with open(results_folder + "our_results.pkl", "rb") as f:
our_results = pickle.load(f)
print(type(baseline_results), len(baseline_results))
print(type(our_results), len(our_results))
<class 'list'> 39
<class 'list'> 39
[14]:
line_plots = []
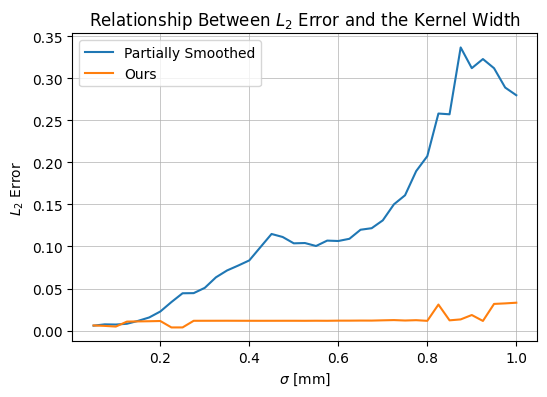
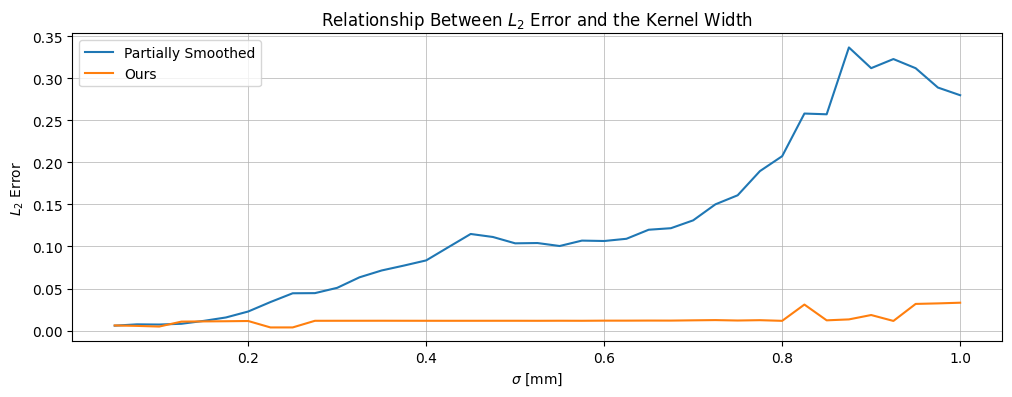
line_plots.append({"key":"convergence_list","title":"Relationship Between $L_2$ Error and the Kernel Width","ylabel":"$L_2$ Error","file_name":"relationship_l2_error.png"})
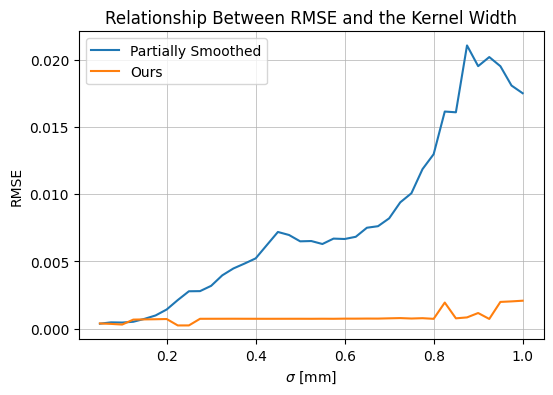
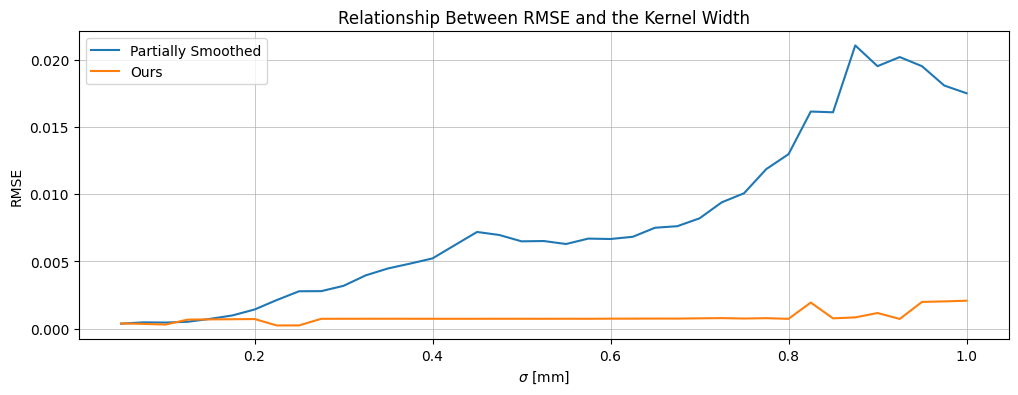
line_plots.append({"key":"rmse_list","title":"Relationship Between RMSE and the Kernel Width","ylabel":"RMSE","file_name":"relationship_rmse.png"})
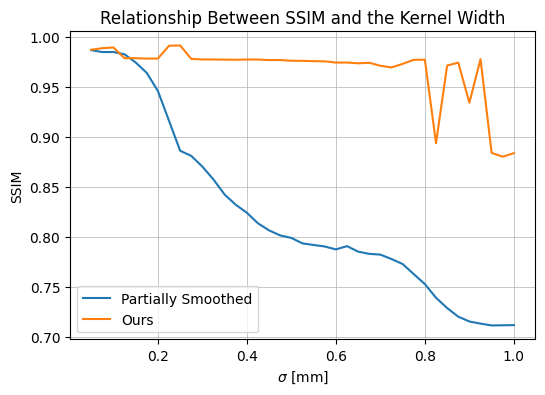
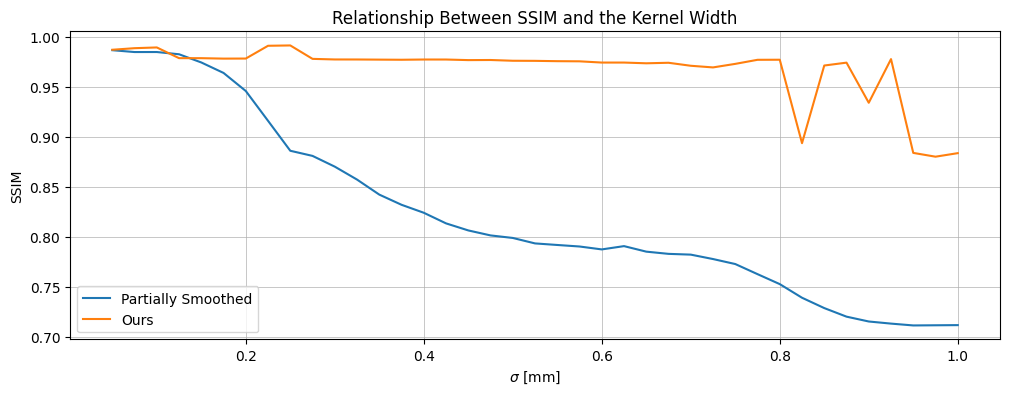
line_plots.append({"key":"ssim_list","title":"Relationship Between SSIM and the Kernel Width","ylabel":"SSIM","file_name":"relationship_ssim.png"})
def make_line_plot(key,title,ylabel,file_name, is_wide):
if is_wide:
file_name = "wide_"+file_name
plt.figure(figsize=(12,4))
else:
file_name = "small_"+file_name
plt.figure(figsize=(6,4))
baseline_conv = [result[key][-1] for result in baseline_results]
our_conv = [result[key][-1] for result in our_results]
sigmas = [result["sigma"] for result in our_results]
ax = plt.gca()
ax.grid(True, which='major', linestyle='-', linewidth=0.5) # Minor grid lines (finer)
ax.grid(True, which='minor', linestyle='-', linewidth=0.5) # Minor grid lines (finer)
ax.set_xlabel("$\\sigma$ [mm]")
ax.set_ylabel(ylabel)
plt.plot(sigmas,baseline_conv,label="Partially Smoothed")
plt.plot(sigmas,our_conv,label="Ours")
plt.title(title)
plt.legend()
#plt.yscale("log")
plt.savefig(results_folder+file_name, dpi=400, bbox_inches='tight')
plt.show()
for _plot in line_plots:
make_line_plot(**_plot, is_wide=False)
make_line_plot(**_plot, is_wide=True)
[9]:
idx = torch.arange(len(baseline_results)//4)*5
idx = [0,10,20,30,38]
[ ]:
[10]:
xbaseline_results = [baseline_results[i] for i in idx]
xour_results = [our_results[i]for i in idx]
xbaseline_results
data_grid = [[]]*4
#result["smooth_irr"] = smooth_irr.cpu().detach()
#result["none_smooth_irr"] = none_smooth_irr.cpu().detach()
data_grid[0] = [result["smooth_irr"] for result in xbaseline_results]
data_grid[1] = [result["smooth_irr"] for result in xour_results]
data_grid[2] = [result["none_smooth_irr"] for result in xbaseline_results]
data_grid[3] = [result["none_smooth_irr"] for result in xour_results]
[11]:
[f'σ={result["sigma"]} mm' for result in xbaseline_results]
[11]:
['σ=0.05 mm', 'σ=0.3 mm', 'σ=0.55 mm', 'σ=0.8 mm', 'σ=1.0 mm']
[12]:
from PIL import Image, ImageDraw, ImageFont
from importlib import reload
from image_grid_maker import image_from_grid
import image_grid_maker
reload(image_grid_maker)
from image_grid_maker import image_from_grid
import image_grid_maker
out_aperture = 8.0
vmin = 0.0
vmax = 0.03
rows_extent = [[-out_aperture,out_aperture,-out_aperture,out_aperture]]*4
rows_vidx = ["x","x","x","x"]
rows_cmap = ["jet"]*4
cbar_titles = ["[W/mm²]"]*4
columns_title = [f'σ={result["sigma"]} mm' for result in baseline_results]
columns_title = [columns_title[i] for i in idx]
rows_title = ["(Partially Smoothed)\nSmoothed Irr.","(Ours)\nSmoothed Irr.","(Partially Smoothed)\nIrr. RC","(Ours)\nIrr. RC"]
data_grid = [data_grid[0],data_grid[2],data_grid[1],data_grid[3]]
rows_title = [rows_title[0],rows_title[2],rows_title[1],rows_title[3]]
rows_vmin = [vmin]*4
rows_vmax = [vmax]*4
kwargs = dict(
image_grid=data_grid,
rows_extent=rows_extent,
rows_vidx=rows_vidx,
rows_cmap=rows_cmap,
rows_title=rows_title,
cbar_titles=cbar_titles,
columns_title=columns_title,
rows_vmin=rows_vmin,
rows_vmax=rows_vmax,
)
out = image_from_grid(
**kwargs,
max_num_column=len(columns_title),
font_size_PIL=40,
cbar_labelsize=20,
cbar_title_fontsize=20,
column_title_ratio=0.3
)
out = out[0]
# Load an image from the file path
image = Image.open(out)
image.save(results_folder+"comparison_collimated.png")
result,system = run_optimiaztion(sigmas[0],use_desired_irradiance_smoothing=True,return_system=True)
rows vmin: [0.0, 0.0, 0.0, 0.0] rows vmax: [0.03, 0.03, 0.03, 0.03]
_image_from_grid 4 4
[13]:
#([tensor(0.), tensor(0.), tensor(0.), tensor(0.)],
# [tensor(0.0288), tensor(0.4965), tensor(0.0287), tensor(0.0393)])
[14]:
out_aperture = 8.0
import numpy as np
import plotly.graph_objects as go
system.cpu()
source = system.modules_dict["source"]
lens1 = system.modules_dict["lens1"]
detector = system.modules_dict["detector"]
in_aperture = 4.0
num_bins = 512
x = np.linspace(-in_aperture, in_aperture, num_bins) # Width
y = np.linspace(-in_aperture, in_aperture, num_bins) # Height
z = torch.zeros((num_bins, num_bins))
tmp = np.meshgrid(x,y)
tmp = torch.tensor([tmp])[0].reshape(2,-1).T
irr_source = source.get_flux(tmp)
irr_source[torch.linalg.norm(tmp,dim=1)>in_aperture]=torch.nan
irr_source = irr_source.reshape(num_bins,num_bins)
print("irr_source",irr_source.shape)
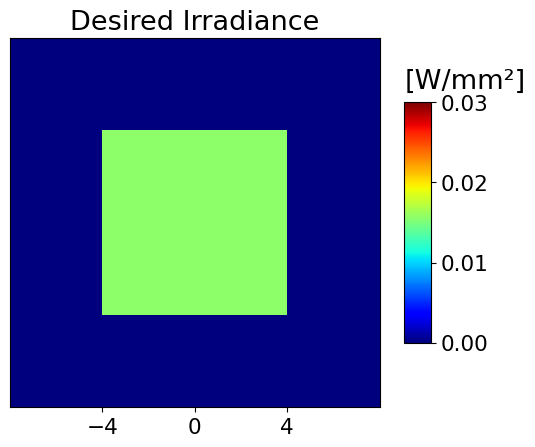
desired_width_square = 4.
def desired_irradiance_func(y):
out = (torch.abs(y[:,0]) < desired_width_square).float() * (torch.abs(y[:,1]) < desired_width_square).float()
return out/((desired_width_square*2)**2)
#dit.plotting.quantity2D.plot(irr_source,title="Radiant Exitance [W/mm²]",x_range=[-out_aperture,out_aperture],cmap="hot")
x = np.linspace(-out_aperture, out_aperture, num_bins) # Width
y = np.linspace(-out_aperture, out_aperture, num_bins) # Height
z = torch.zeros((num_bins, num_bins))
tmp = np.meshgrid(x,y)
tmp = torch.tensor([tmp])[0].reshape(2,-1).T
desired_irr = desired_irradiance_func(tmp.reshape(-1,2)).reshape(num_bins,num_bins)
print("desired_irr",desired_irr.shape,tmp.shape)
#vmax = torch.max(irr_source).item()
import matplotlib.pyplot as plt
# Assume you already have:
# - irrs: list of 2D arrays (irradiance maps)
# - rows_extent: list of [xmin, xmax, ymin, ymax] per image
# - sigmas: list of sigma values used for smoothing
cbar_labelsize=12
cbar_title_fontsize=15
# Grid dimensions
rows_extent = [[-in_aperture, in_aperture, -in_aperture, in_aperture]] +[[-out_aperture, out_aperture, -out_aperture, out_aperture]]
irrs = [irr_source,desired_irr]
irrs = [irr.cpu() for irr in irrs]
num_rows = 1
num_cols = len(irrs)
fig, axes = plt.subplots(num_rows, num_cols, figsize=(4 * num_cols, 4), constrained_layout=True)
# Titles for each column
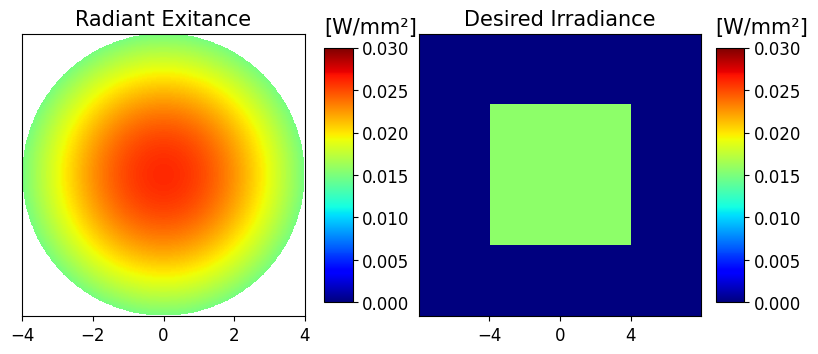
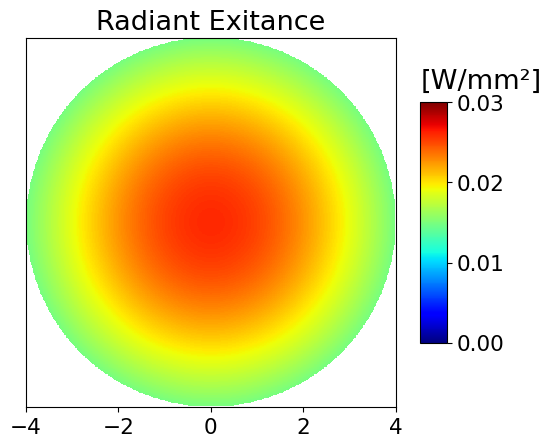
columns_title = ["Radiant Exitance"] + [f"Desired Irradiance" for sigma in sigmas]
cmaps = ["jet","jet"]
cbar_title = "[W/mm²]"
for k in range(num_cols):
ax = axes[k]
img = irrs[k]
cmap = cmaps[k]
im = ax.imshow(img, extent=rows_extent[k],origin='lower', cmap=cmap,interpolation="nearest",vmin=vmin,vmax=vmax)
ax.set_title(columns_title[k],fontsize=cbar_title_fontsize)
if k != 0:
ax.set_xticks([-4,0,4])
ax.set_yticks([])
ax.tick_params(labelsize=cbar_labelsize)
cbar = plt.colorbar(im,ax=ax,shrink=0.65,aspect=9) # Add a colorbar for reference
cbar.ax.tick_params(labelsize=cbar_labelsize)
cbar.ax.set_title(cbar_title, fontsize=cbar_title_fontsize, pad=10,loc="left") # Set label above
offset_text = cbar.ax.yaxis.offsetText
offset_text.set_size(cbar_labelsize) # Set the font size
offset_text.set_ha('left') # Align the text to the left
#plt.suptitle("Irradiance Maps from Ray Counting and Smoothing", fontsize=16)
plt.savefig(results_folder+"radiant_exitance_desired_irr.png", dpi=400, bbox_inches='tight')
plt.show()
C:\Users\marti\AppData\Local\Temp\ipykernel_12676\1628606591.py:19: UserWarning: Creating a tensor from a list of numpy.ndarrays is extremely slow. Please consider converting the list to a single numpy.ndarray with numpy.array() before converting to a tensor. (Triggered internally at C:\actions-runner\_work\pytorch\pytorch\pytorch\torch\csrc\utils\tensor_new.cpp:256.)
tmp = torch.tensor([tmp])[0].reshape(2,-1).T
irr_source torch.Size([512, 512])
desired_irr torch.Size([512, 512]) torch.Size([262144, 2])
[15]:
font_multi = 1.3
for k in range(num_cols):
ax = plt.gca()
img = irrs[k]
cmap = "jet"
im = ax.imshow(img, extent=rows_extent[k],origin='lower', cmap=cmap,interpolation="nearest",vmin=vmin,vmax=vmax)
ax.set_title(columns_title[k],fontsize=cbar_title_fontsize*font_multi)
if k != 0:
ax.set_xticks([-4,0,4])
ax.set_yticks([])
ax.tick_params(labelsize=cbar_labelsize*font_multi)
cbar = plt.colorbar(im,ax=ax,shrink=0.65,aspect=9) # Add a colorbar for reference
cbar.ax.tick_params(labelsize=cbar_labelsize*font_multi)
cbar.ax.set_title(cbar_title, fontsize=cbar_title_fontsize*font_multi, pad=10,loc="left") # Set label above
offset_text = cbar.ax.yaxis.offsetText
offset_text.set_size(cbar_labelsize*font_multi) # Set the font size
offset_text.set_ha('left') # Align the text to the left
plt.savefig(results_folder+f"radiant_exitance_desired_irr_sep{k}.png", dpi=400, bbox_inches='tight')
plt.show()
[16]:
xr,_ = source.sample(15)
sequence = ["source","lens1","detector"]
O,D,wave_len,_,RayPaths = system(xr,sequence)
if not RayPaths is None:
if isinstance(RayPaths,dict):
rays = RayPaths["ray_paths"]
show_grid=True
xlabel="x [mm]"
ylabel="y [mm]"
zlabel="z [mm]"
xticks=None
yticks=None
zticks=None
axislabel_font_size=10
tick_font_size=10
ray_color="#9673A6"
ray_linewidth=3.
data = []
resolution = 32
data += dit.plotting.system3D._plot_surface_recursively(lens1,"",resolution)
data += dit.plotting.system3D._plot_surface_recursively(source,"",resolution)
data += dit.plotting.system3D.ray_paths(rays,ray_color,ray_linewidth)
layout = dit.plotting.system3D.get_optical_system_layout(False,xlabel,ylabel,zlabel,xticks,yticks,zticks,axislabel_font_size,tick_font_size)
import plotly.graph_objects as go
none_smooth_irr = result["none_smooth_irr"]
num_bins = none_smooth_irr.shape[0]
out_aperture = 8.0
x = np.linspace(-out_aperture, out_aperture, num_bins) # Width
y = np.linspace(-out_aperture, out_aperture, num_bins) # Height
z = torch.ones((num_bins, num_bins))*detector.get_transformation_matrix()[2,3] # Flat surface
z = z.detach()
gosurface2 = go.Surface(
x=x,
y=y,
z=z,
surfacecolor=none_smooth_irr,
cmin=vmin,
cmax=vmax,
colorbar=dict(
title=dict(text='[W/mm²]', font=dict(size=16)), # Increase title font size
tickfont=dict(size=14) # Increase tick font size
),
colorscale="jet",
showscale=True,
showlegend=False
)
data += [gosurface2]
fig = go.Figure(data=data,layout=layout)
fig.write_html(results_folder+"collimated2.html")
#fig.show()
c:\Users\marti\anaconda3\envs\working\Lib\site-packages\torch\functional.py:505: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at C:\actions-runner\_work\pytorch\pytorch\pytorch\aten\src\ATen\native\TensorShape.cpp:4383.)
return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]
[7]:
def create_optical_system_from_light_source(source):
in_aperture_lens = 5.0
out_aperture = 8.0
lens_mat = dit.materials["NBK7"]
env_mat = dit.materials["NONE"]
lens1_thickness = 2.
lens1_surf1 = dit.Bspline(in_aperture_lens,[4,4],[11,11])#dit.Legendre(in_aperture_lens,20)#
lens1_surf2 = dit.Plane()
det_surf = dit.Plane()
lens1_transform = dit.transforms.Distance(5.0,parent_transform=source)
lens1_transform.distance.requires_grad = False
lens1 = dit.Lens(lens1_transform,lens1_thickness,lens1_surf1,lens1_surf2,lens_mat,in_aperture_lens,is_square=False)
det_transform = dit.transforms.Distance(10.,parent_transform=lens1)
det_transform.distance.requires_grad = False
detector = dit.Detector(det_transform,det_surf,out_aperture)
system = dit.SequentialOpticalSystem({"source":source,"lens1":lens1,"detector":detector},env_mat)
return system
def create_collimated_system():
light_transform = dit.transforms.Identity()
in_aperture = 4.0
source_wl = 0.589
source_gaussian_constant = 0.035
source = dit.source.CollimatedMonochromatic1D(light_transform,in_aperture,source_wl)
system = create_optical_system_from_light_source(source)
return system
[13]:
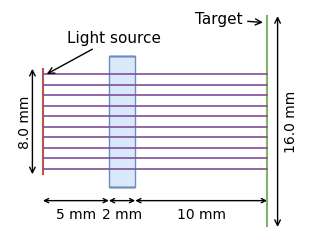
system_collimated = create_collimated_system()
xr,_ = system_collimated.modules_dict["source"].sample([10],"midpoint")
sequence = ["source","lens1","detector"]
offset_arrows = -7.5
fontsize = 14
fig, ax = plt.subplots(figsize=(3.2, 3.4))
O,D,wave_len,_,RayPaths = system_collimated(xr,sequence)
#plt.title("Layout of Optical System 2", fontsize=fontsize)
#plt.xlabel("z [mm]", fontsize=fontsize)
#plt.ylabel("y [mm]", fontsize=fontsize)
#plt.tick_params(axis='both', which='major', labelsize=fontsize)
dit.plotting.system2D.plot(system_collimated,RayPaths,show=False)
"""dit.plotting.system2D.annotated_arrow([0,offset_arrows],[5,offset_arrows],(-20,-15),"$5$[mm]","<->",fontsize=fontsize)
dit.plotting.system2D.annotated_arrow([5,offset_arrows],[5+2,offset_arrows],(-12,-15),"$2$[mm]","<->",fontsize=fontsize)
dit.plotting.system2D.annotated_arrow([5+2,offset_arrows],[5+2+10,offset_arrows],(0,-15),"$10$[mm]","<->",fontsize=fontsize)
dit.plotting.system2D.annotate_position([0,4],(-20,20),"Light source",fontsize=fontsize)
#dit.plotting.system2D.annotate_position([5+1,5],(-20,20),"Lens",fontsize=fontsize)
dit.plotting.system2D.annotate_position([5+2+10,6],(-60,10),"Target",fontsize=fontsize)
light_radius = system_collimated.modules_dict["source"].aperture_radius
detector_radius = system_collimated.modules_dict["detector"].aperture_radius
dit.plotting.system2D.annotated_arrow([-0.5,-light_radius ],[-0.5,light_radius ],(-16,-15),f"${2*light_radius}$[mm]","<->",rotation=90,fontsize=fontsize)
dit.plotting.system2D.annotated_arrow([5+2+10+0.5,-detector_radius ],[5+2+10+0.5,detector_radius ],(2,-15),f"${2*detector_radius}$[mm]","<->",rotation=90,fontsize=fontsize)
"""
# /// script
# requires-python = ">=3.10"
# dependencies = [
# "matplotlib>=3.8",
# "numpy>=1.24",
# ]
# ///
"""Generate a frameless version of layout2.png (Layout of Optical System 2)."""
import matplotlib.pyplot as plt
import matplotlib.patches as patches
import numpy as np
from pathlib import Path
# Geometry (all in mm)
z_source = 0.0
z_lens_start = 5.0
z_lens_end = 7.0
z_target = 17.0
source_half_height = 4.0 # 8 mm total
lens_half_height = 5.0 # 10 mm total
target_half_height = 8.0 # 16 mm total
ax = plt.gca()
# --- Annotations ---
# "Light source" label with arrow
ax.annotate('Light source', xy=(z_source + 0.1, source_half_height - 0.5),
xytext=(1.8, 5.8), fontsize=11,
arrowprops=dict(arrowstyle='->', color='black', lw=1.0),
ha='left', va='bottom')
# "Target" label with arrow
ax.annotate('Target', xy=(z_target - 0.1, target_half_height - 0.5),
xytext=(11.5, 7.2), fontsize=11,
arrowprops=dict(arrowstyle='->', color='black', lw=1.0),
ha='left', va='bottom')
# --- Dimension arrows ---
# Vertical dimension: 8.0[mm] on left side (close to source)
dim_x_left = -0.8
ax.annotate('', xy=(dim_x_left, source_half_height),
xytext=(dim_x_left, -source_half_height),
arrowprops=dict(arrowstyle='<->', color='black', lw=1.0,
shrinkA=0, shrinkB=0))
ax.text(dim_x_left - 0.6, 0, '8.0 mm', fontsize=10, ha='center', va='center',
rotation=90)
# Vertical dimension: 16.0[mm] on right side (close to target)
dim_x_right = 17.8
ax.annotate('', xy=(dim_x_right, target_half_height),
xytext=(dim_x_right, -target_half_height),
arrowprops=dict(arrowstyle='<->', color='black', lw=1.0,
shrinkA=0, shrinkB=0))
ax.text(dim_x_right + 1.0, 0, '16.0 mm', fontsize=10, ha='center', va='center',
rotation=90)
# Horizontal dimensions at bottom (moved closer to lens)
dim_y = -6.0
h_arrow = dict(arrowstyle='<->,head_width=0.15,head_length=0.3', color='black', lw=1.0,
shrinkA=0, shrinkB=0)
# 5[mm]: z=0 to z=5
ax.annotate('', xy=(z_source, dim_y), xytext=(z_lens_start, dim_y),
arrowprops=h_arrow)
ax.text((z_source + z_lens_start) / 2, dim_y - 0.5, '5 mm', fontsize=10,
ha='center', va='top')
# 2[mm]: z=5 to z=7
ax.annotate('', xy=(z_lens_start, dim_y), xytext=(z_lens_end, dim_y),
arrowprops=h_arrow)
ax.text((z_lens_start + z_lens_end) / 2, dim_y - 0.5, '2 mm', fontsize=10,
ha='center', va='top')
# 10[mm]: z=7 to z=17
ax.annotate('', xy=(z_lens_end, dim_y), xytext=(z_target, dim_y),
arrowprops=h_arrow)
ax.text((z_lens_end + z_target) / 2, dim_y - 0.5, '10 mm', fontsize=10,
ha='center', va='top')
# --- Remove frame, axis labels, tick labels ---
ax.set_axis_off()
# Set limits to give appropriate padding
ax.set_xlim(-2.5, 19.5)
ax.set_ylim(-8, 8.5)
ax.set_aspect('equal')
plt.tight_layout()
#out = Path(__file__).parent / 'layout2_frameless.png'
#fig.savefig(out, dpi=150, bbox_inches='tight', facecolor='white')
#print(f"Saved to {out}")
plt.savefig("results/ilustrations/layout2.png", dpi=400, bbox_inches='tight')
#plt.margins(x=0.2,y=0.2)
WARNING: ray_paths will project the ray position onto the y-z plane!
[17]:
system_collimated.modules_dict["detector"].to_global_pos(torch.tensor([0.0,0.0,0.0])[None]),5+2+10
[17]:
(tensor([[ 0., 0., 17.]], grad_fn=<IndexBackward0>), 17)
[ ]: